Embodied Curiosity
Physical Product Exploration - Royal College of Art / Imperial College London
Product Design, Arduino Build, Introduction to Java & C++
(November 2019)

A simple product designed to remind us what real curiosity feels like, inspired by our mutual love for puppies.
What’s it like to interact with something that’s nervous about interacting with you? This was my initial question and driving force behind my gizmo project. Using a combination of 3d printing, sewing, lego bikes, an arduino platform, and a simple distance sensor, I created a simple creature to immitate this interesting interaction that is far more common than you might think.
Concept.
The development of this project came in two different halves. First, defining the concept that would drive the movement of my gizmo, and secondly figuring out which pieces and parts I would need to actually make this work. I found my concept while spending time at a pub outside London where I met a puppy who was less excited to see me as I was to see him.
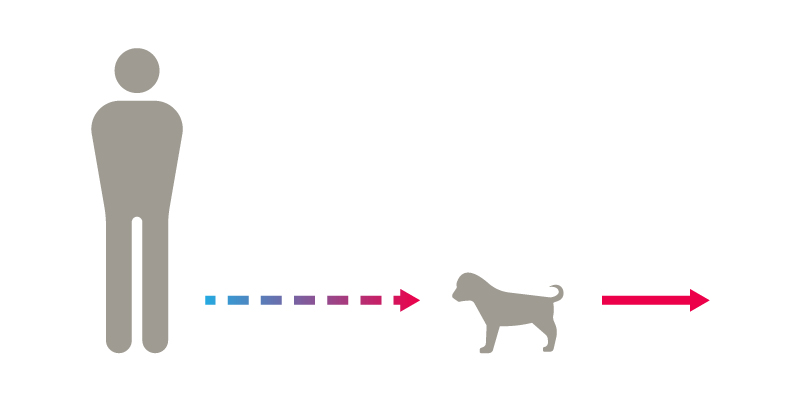
Excitement:
When meeting this puppy for the first time, I was overly excited and approached the dog much quicker than it was okay with. As I came forward quickly to pet the dog and give him a bit of love, he was scared and backed away just as fast as I approached. Which was a bummer, but understandable from his perspective.
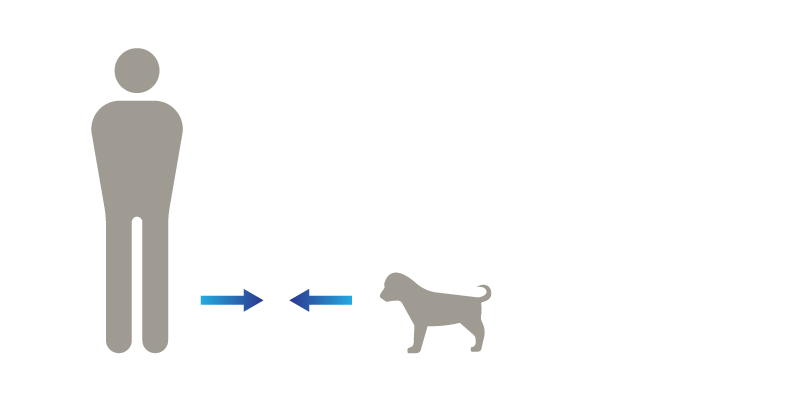
Caution:
After the dog backed away, curiosity overtook him and luckily he slowly approached me to smell my hand. But I had to stay low and be cautious myself so as not to scare him again. I was this simple interaction that I found so interesting and hoped to recreate with my gizmo.
Prototyping.
V1:
Initial setup looked to understand usage of the ultrasonic distance sensor to control different lights based on how far away the user was.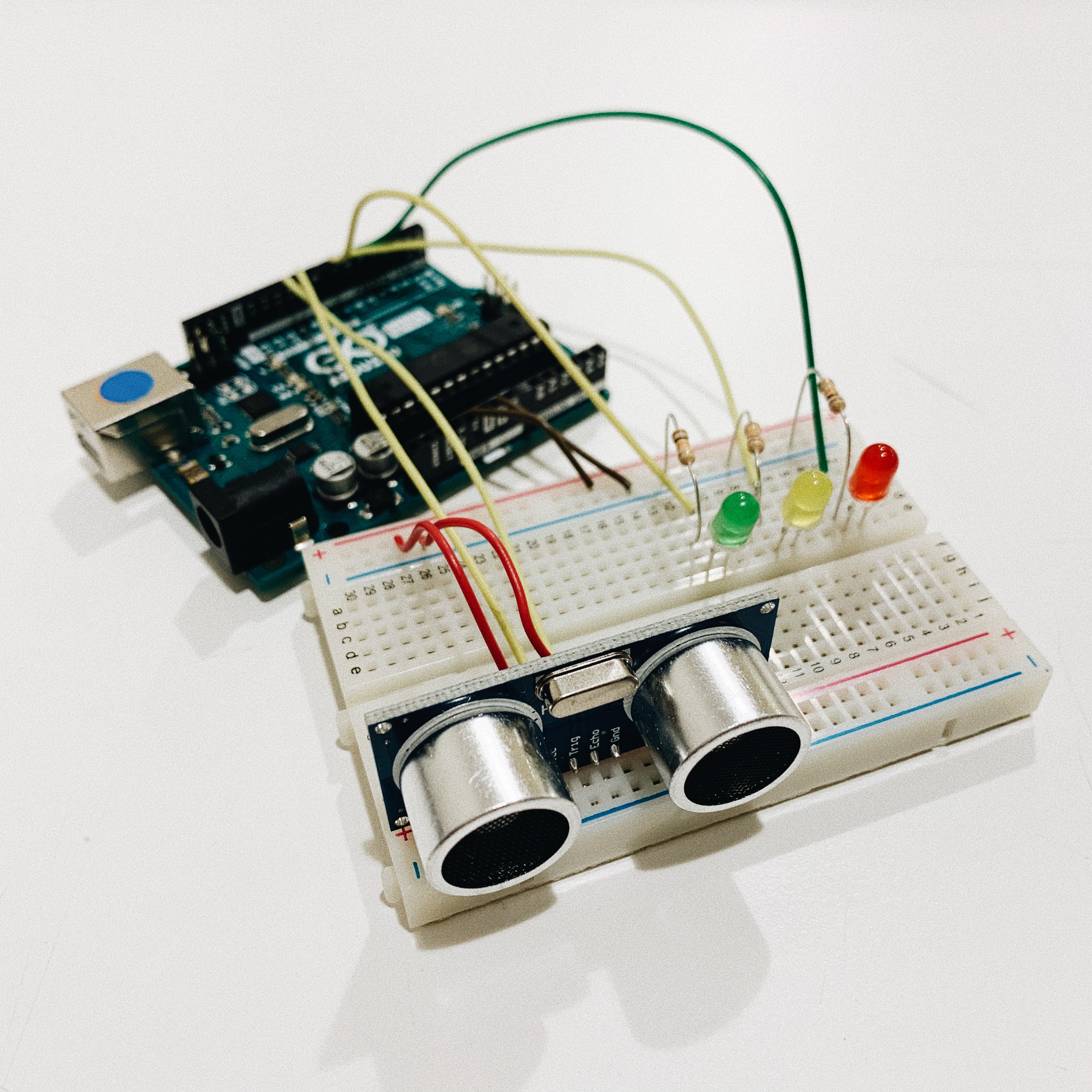
V2:
Second version looked to control a stepper motor to move in two different directions based on the physical distance from the sensor, similar to that of the lights.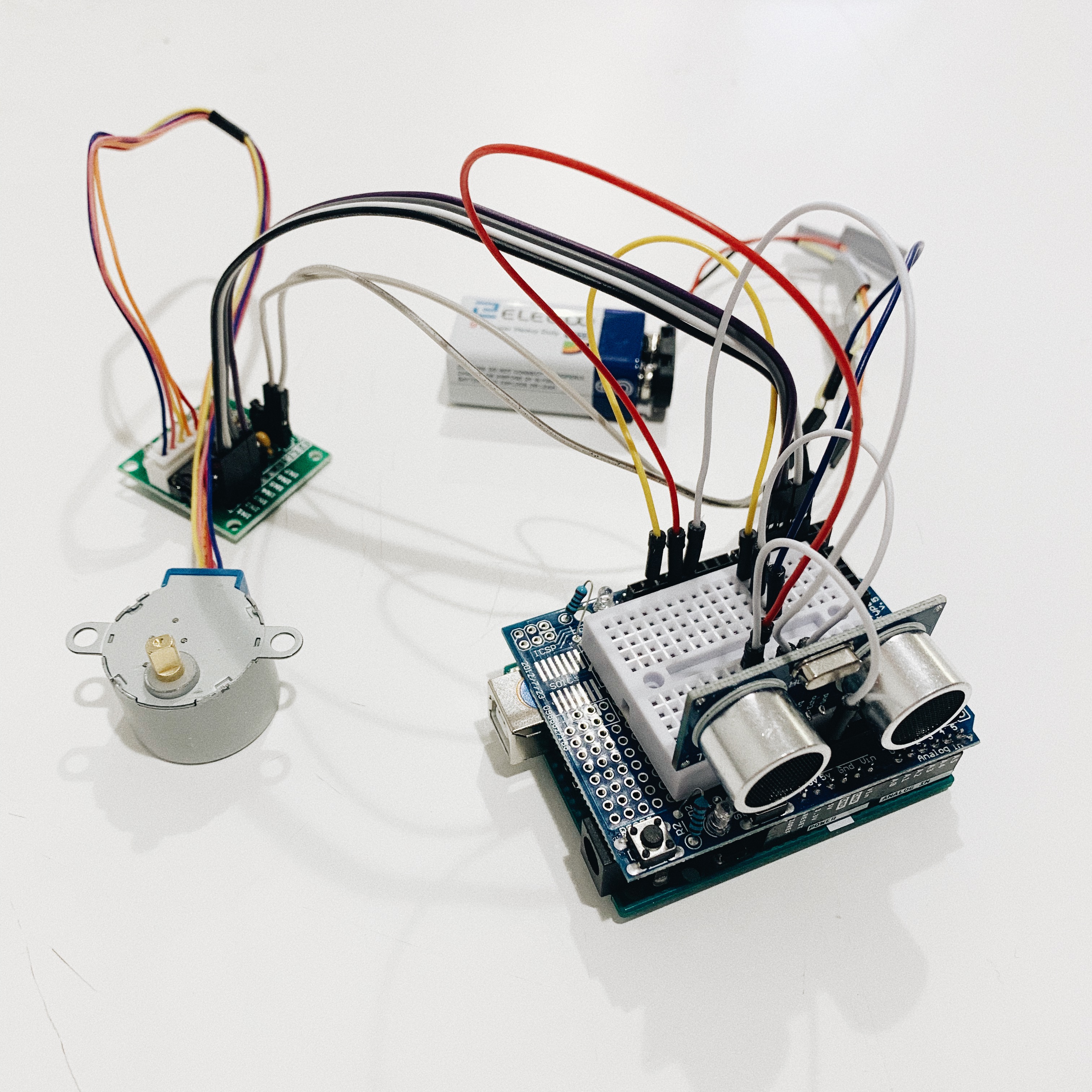
V3:
Third and final version looked to slim down the overall construction, include a power source, and include specific distances traveled by the stepper motor dependent on distance from the sensor.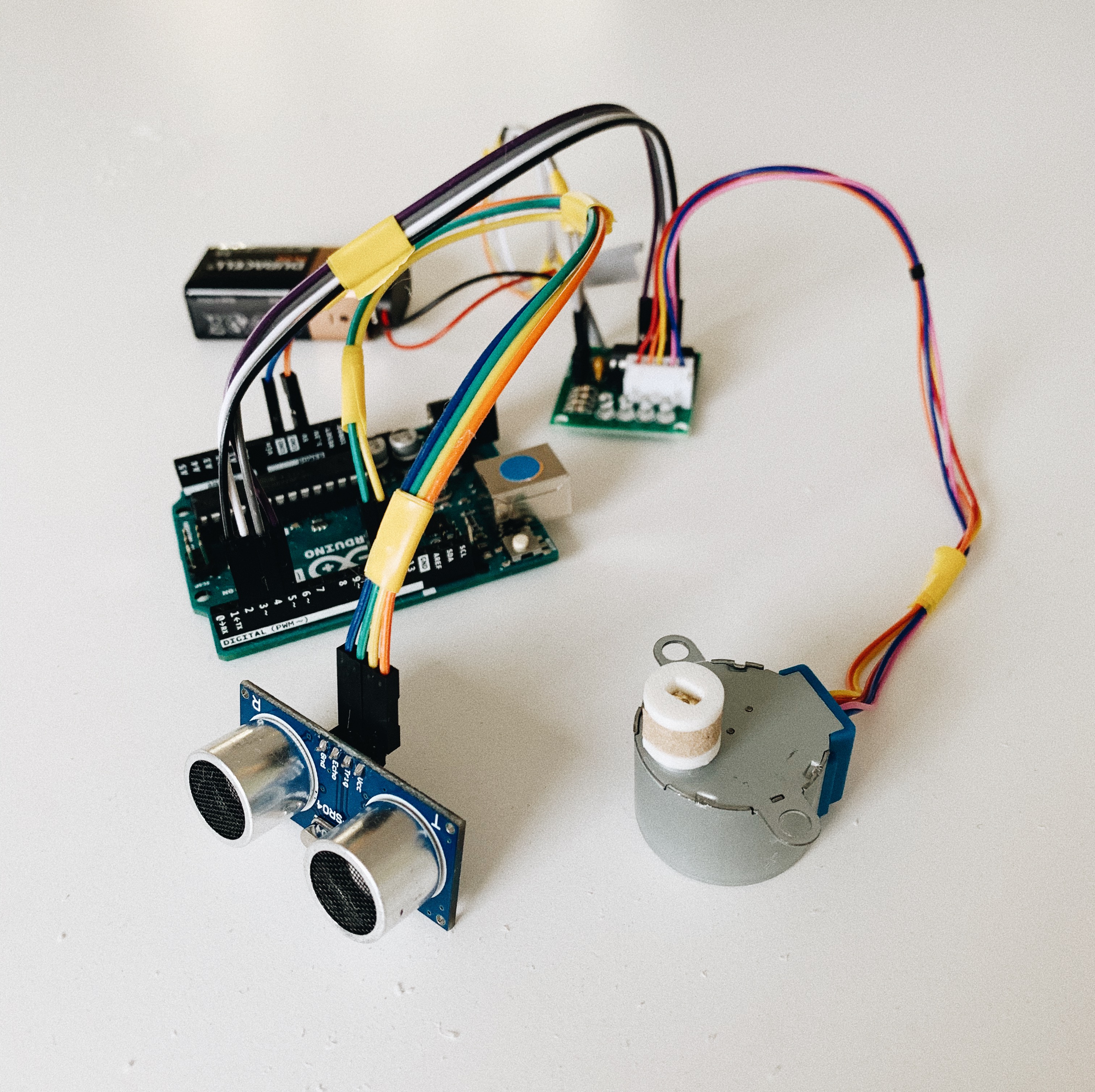
Initial prototyping, testing V1 of my arduino build, attempting to set distance limits to then translate over to a stepper motor that will drive the device forward and backward.
Build.
After defining the concept and establishing the required parts, I set out to attempt and understand how to program and use the arduino to move in the way that I needed it to. While working on the code, I also needed to create a housing not only for all the parts, but also to hopefully immitate what this little creature would look like. Something cute and small that would encourage people to interact with it in the way that I hoped for.
I opted for a small rectangular container, using the distance sensor to act as eyes, and hiding the working parts and wheels inside so it wouldn’t distract from the overall gizmo.
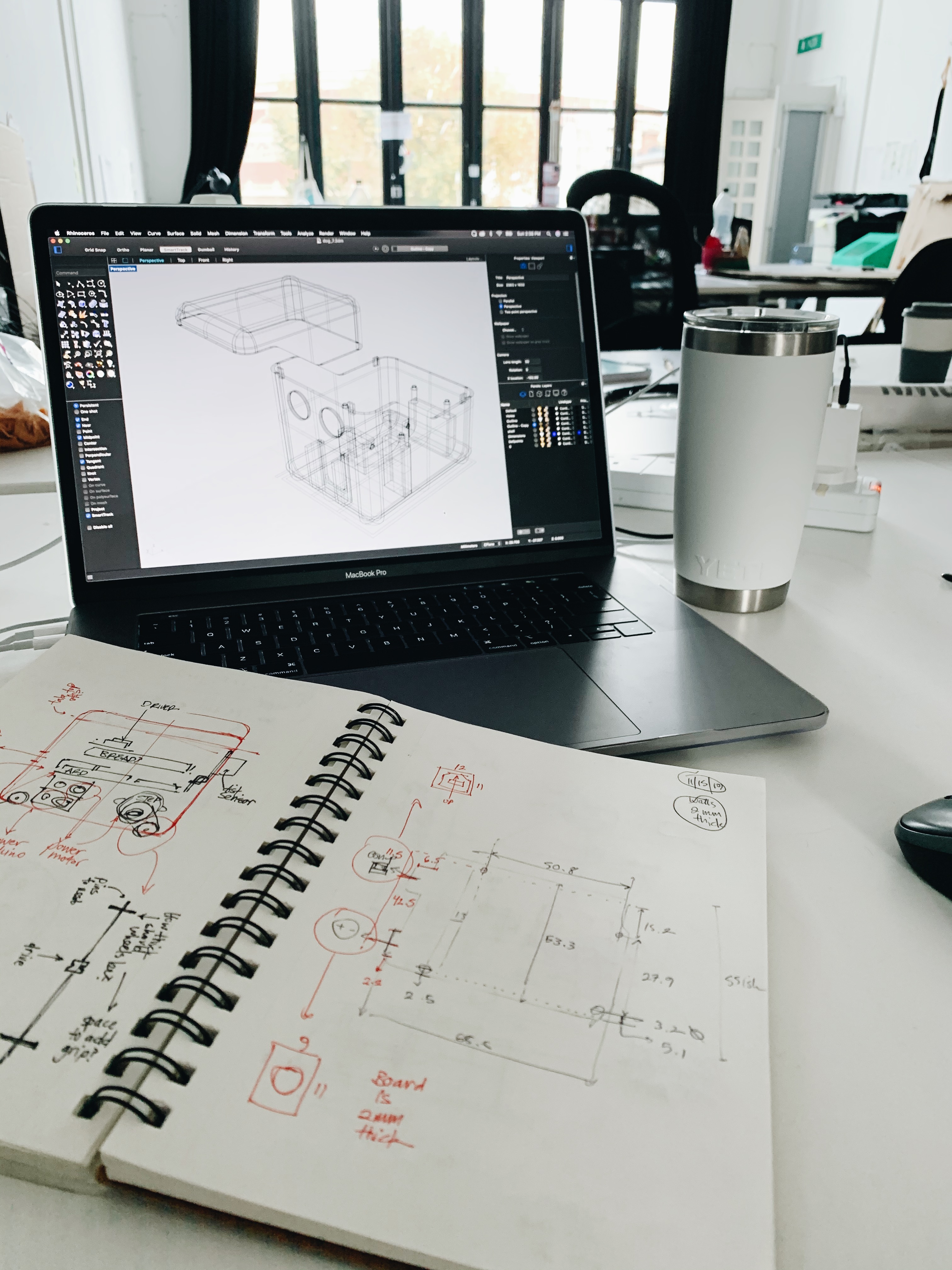
Spec drawings were all done by hand, a lot of guesswork went into it if i’m honest. Then the body casing was designed in Rhino and 3D printed in white PLA.
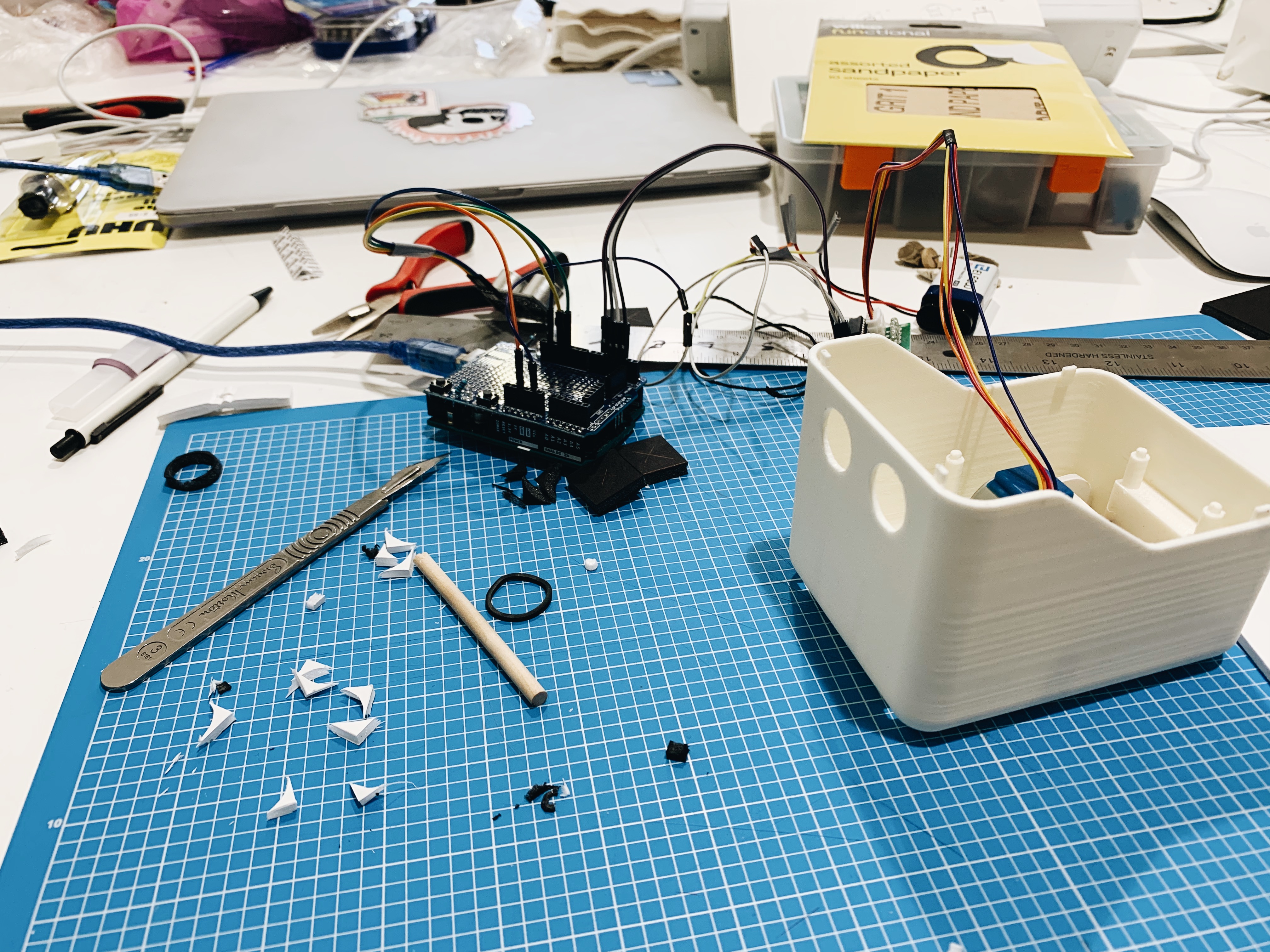
Beginning to assemble the adruino build with the printed casing, layering pieces as they stack within the case.
Working out bugs in the code, I found myself struggling. to define how often the distance sensor should take readings and then act accordingly.
Nearing completion on the code, essentially allowing for the user to draw closer to the device, but if you get within a certain distance it will automatically withdraw quickly... only to then approach slowly when it senses a presence.
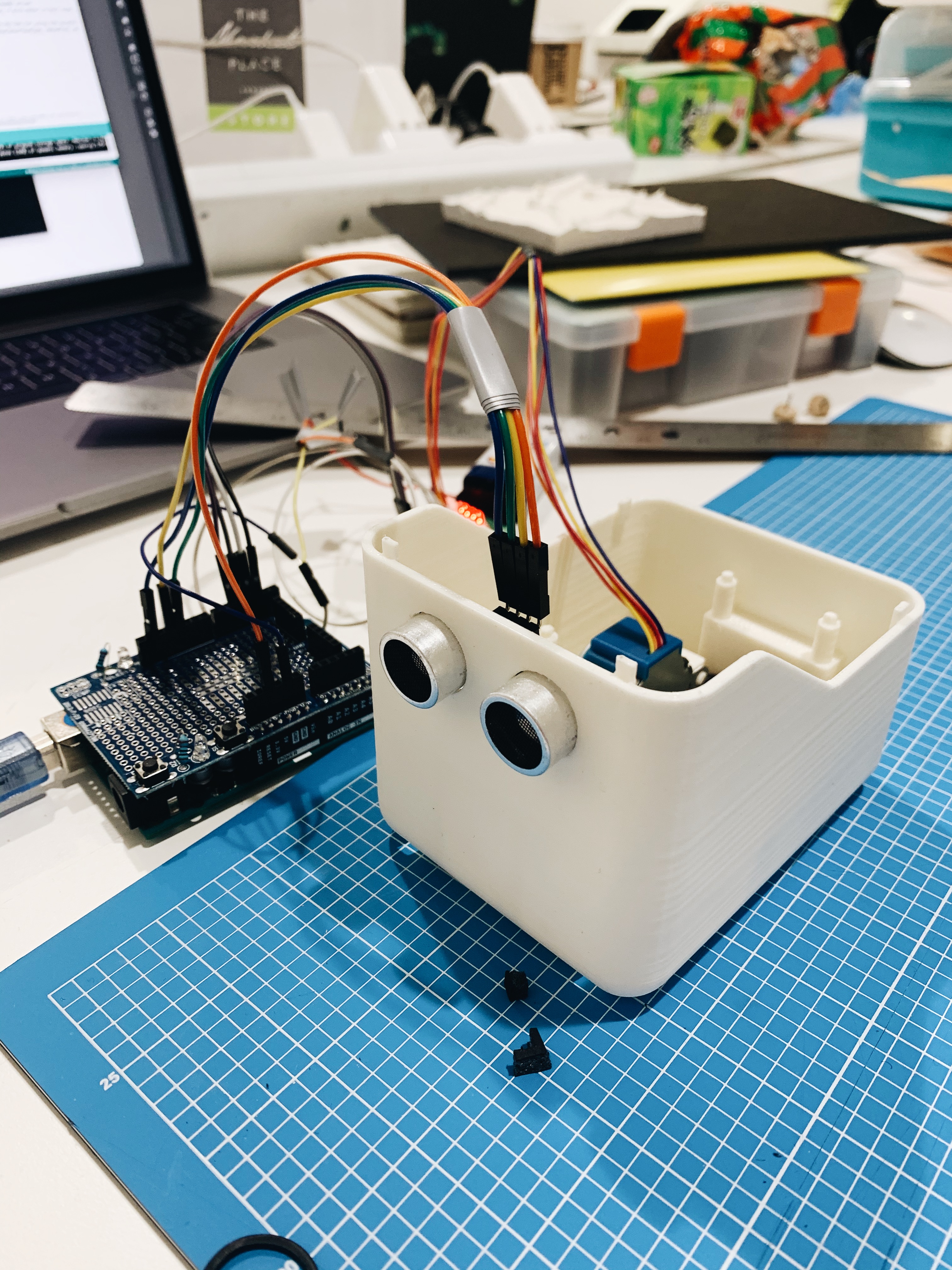


A quick look at the final assembly of my device before adding a skin to it.
Final product.
In the end, I was able to create the physical movement of the gizmo using 3d printed wheels and a wooden axel, allowing it to move toward your hand and back away when you get too close. It took a good amount of work to get it to travel at the speed I was looking for, but eventually we got there.
Unfortunately something still felt off, it looked too clean and designed, and my hope was to make it feel cuddly. So after searching charity shops near the school, I found a hot water bottle with a fuzzy case at a thrift store near school. This provided the hand sewn, fur casing for my gizmo. This really brought the whole project together and made it much more approachable as an object to interact with.

Lessons learned.
Funny enough, looking back, despite the fact that the movement was far from perfect and the code could have used quite a bit more work to make things smooth and seamless, the fur on the outside made it seem as if it was completely finished. To the point that no one ever mentioned that the moevement was weird or slow, instead they all just talked about how cute it was.
Funny how a polished finish can distract from things like that.